When we talk about particle sensor performance, most discussions focus on accuracy under controlled, stationary conditions, and that makes sense! Both because most air quality monitors are stationary, and because accuracy matters a lot. In fact, even here on our own website we normally focus on these kinds of comparisons!
However, portable air quality monitors live in a very different world. They’re designed - or at least, should be - to be constantly moving through changing environments: traffic intersections, food stalls, indoor/outdoor transitions, or even just riding on a bike. In these situations, what matters almost as much as overall accuracy is how a sensor behaves in motion. Interestingly, this is also something that’s far less studied and researched.
As part of developing the upcoming AirGradient Go portable monitor, we wanted to understand exactly how different PM sensors respond when exposed to rapid changes in particle concentration while physically moving. Specifically, we were interested in answering two key questions:
- How quickly do different sensors react to sudden shifts in pollution levels?
- How stable do readings from different sensors remain while in motion?
These characteristics directly influence how useful a portable device is for detecting short-lived pollution hotspots or tracking exposure during everyday movement. Importantly, the answers to these two questions allowed us to make the best decision when it came to picking a PM sensor for our upcoming portable device.
To explore this further, we mounted multiple sensors that we were considering using in the Go inside our first enclosures and attached them to a small RC car. By driving the rig through tunnels with very different particle concentrations (including transitions from clean air into heavy smoke) we simulated real-world scenarios where a portable monitor might encounter abrupt environmental changes. All sensors were logged simultaneously at high frequency, allowing us to compare their response characteristics side-by-side.
Now, before we get started it’s important to clarify what these tests are, and what they are not. This experiment was not an accuracy validation (quite the opposite as we didn’t discuss accuracy at all!). Instead, we wanted to focus on dynamic behaviour such as response times, stability during motion, and how clearly each sensor captured rapid environmental transitions. The goal here was to understand performance in the kinds of moving scenarios a portable monitor should actually be designed for.
The Chosen Sensors

We compared five sensors from three major manufacturers that are commonly used in compact air quality monitors. Below are the sensors we compared:
| Sensor Model | Manufacturer | Devices Using this Sensor |
|---|---|---|
| SPS30 | Sensirion | Atmotube Pro, Atmotube Pro 2 |
| PMSA003I | Plantower | |
| PMS5003 | Plantower | AirGradient One, AirGradient Open Air |
| PMS7003 | Plantower | AirBeam Mini, AirBeam 3 |
| PM2012 | Cubic | Mostly used in devices like HVAC systems and air purifiers. |
| PM2016 | Cubic | Mostly used in devices like HVAC systems and air purifiers. |
Measurements were recorded at high frequency (approximately once per second) to capture fast transitions as clearly as possible. Where available, we also logged raw particle counts alongside PM2.5 mass concentrations, giving additional insight into how each sensor processed changing particle conditions.
To simulate realistic exposure changes, the test rig was repeatedly driven through enclosed tunnels with intentionally different air quality conditions. Sometimes the tunnels were filled with dense particulate matter generated using incense, creating sharp spikes in pollution levels. Other times these were kept relatively clean to represent low-particle environments. Moving between these zones produced abrupt concentration shifts similar to what a portable monitor might encounter in real life - for example when passing through traffic exhaust, street cooking smoke, or transitioning between indoor and outdoor air.
How Quickly Each Sensor Reacts to Sudden Pollution Changes
To evaluate response time, we looked at the moments where the RC rig transitioned between clean air and heavy particulate exposure. These step-like changes created near-instant concentration shifts. A fast sensor rose sharply with minimal lag, while a slower sensor showed a delay or gradual ramping.
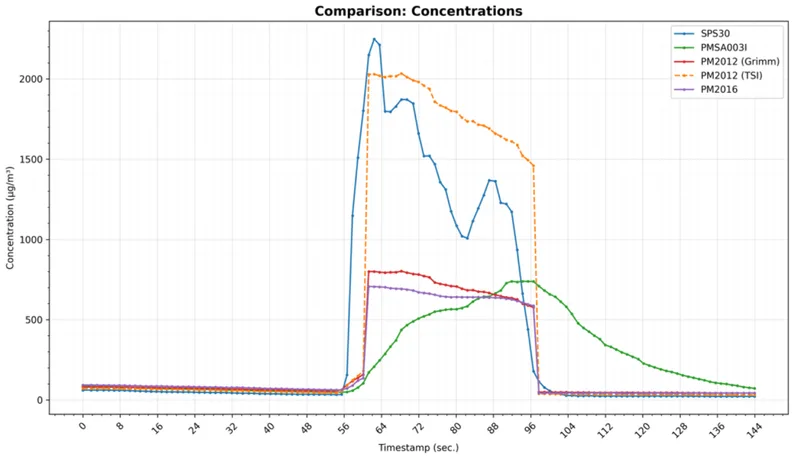
When entering high-pollution zones, we noticed quite different behaviours from the sensors, with some characteristics seemingly common across the brands.
SPS30 (Sensirion)
This sensor consistently showed the fastest response times. Spikes were steep and immediate, with minimal ramp-up. In several runs, the SPS30 reached peak concentration before other sensors had fully climbed. This was ideal for detecting short-lived pollution hotspots.
PMSA003I (Plantower)
This sensor showed a gradual increase and had a far slower response time than the Cubic and Sensirion sensors. While it captured the event, the peak was far lower than the other devices and, in the case above, the peak occurred once the car had left the tunnel. This suggested some kind of averaging algorithm was being used.
PMS7003 (Plantower)
This was not included in the test above, but it showed a similar averaging behaviour to the PMSA003I.
PM2012 / PM2016 (Cubic)
Both Cubic sensors demonstrated a slightly slower response time than the Sensirion sensor, but only by a few seconds. Depending on the calibration (Cubic offers two for the PM2012), the peak was also far lower than recorded on the Sensirion SPS30.
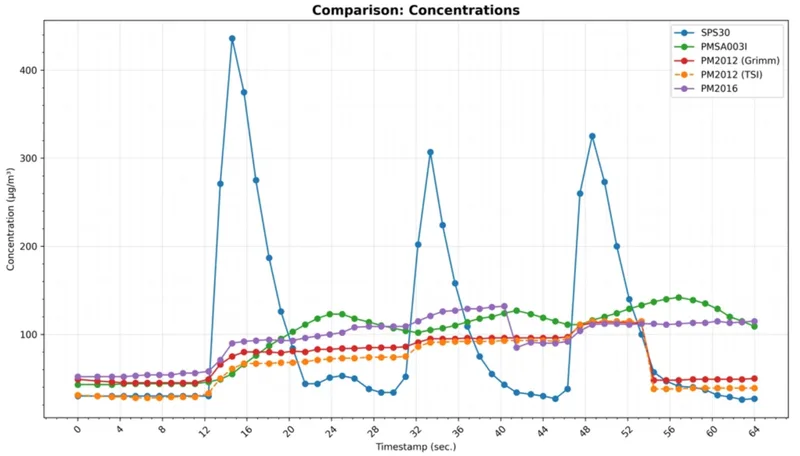
When rapidly entering and exiting tunnels, the Sensirion sensor was the only sensor that identified the spikes and reacted as we would expect. When passing through the clean air tunnel, it was also the only sensor that identified the lower concentration zone.
The Cubic sensors again recognised the increase in concentration, but at this higher speed they didn’t react at the level we would expect and only showed a minor jump in concentration. Again, the Plantower sensor showed a very delayed response and it was clear that some kind of averaging was happening here as there were peaks, but they were quite delayed and occurred when the sensor should have been showing cleaner air instead.
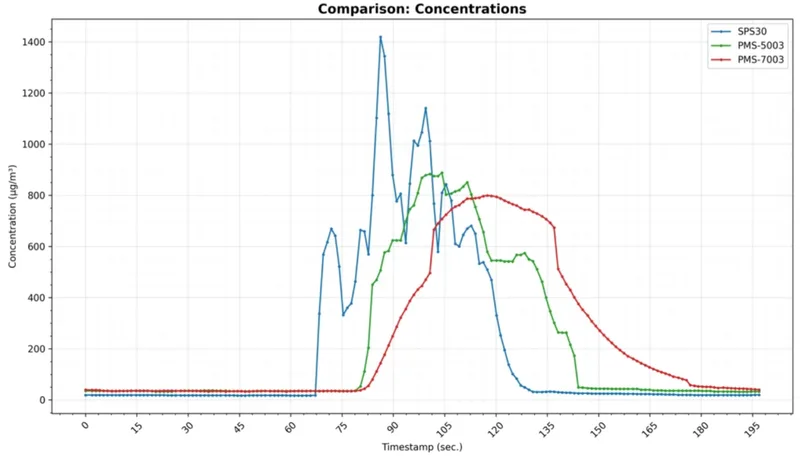
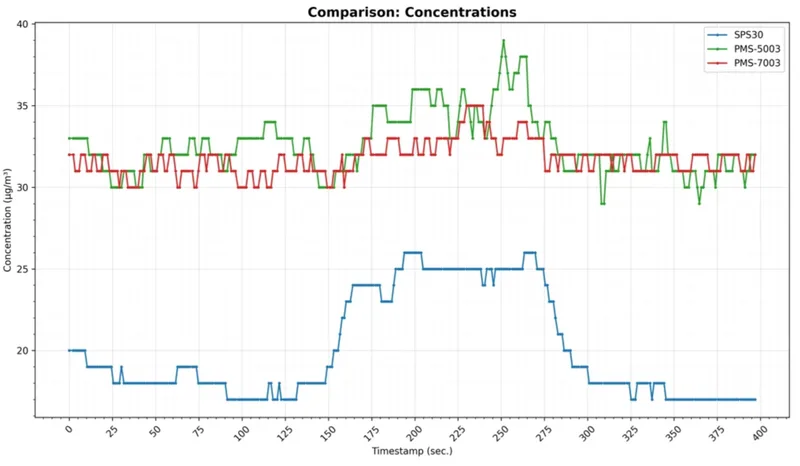
As mentioned, we also tested the PMS5003 and PMS7003 from Plantower as well. Above is a run where we parked the car in the high-concentration tunnel for 30 seconds before driving it into cleaner air again. As you can see, the PMS7003 had the same behaviour as the PMSA003I, and the PMS5003 appeared to have some similar averaging but to a lesser extent as it was better able to show peaks - just at a slower response rate than the SPS30.
From these results, the SPS30 looked like the obvious best choice. A PM sensor on a portable monitor is only useful if it can show spikes as they occur in real time, and while both the Cubic and Sensirion sensors were capable of this, the Sensirion showed values much closer to the actual concentrations in the tunnels. With that said, this only answered our first question and we wanted to see how the sensor performed simply while moving.
Stability Under Motion
While response speed tells us how quickly a sensor reacts to changing air, portable monitoring introduces another challenge: motion itself. A device mounted on a bike, carried in a bag, or moving through uneven terrain experiences constant vibration, airflow shifts, and sometimes even orientation changes. Ideally, a sensor should reflect real environmental variation, not artifacts caused by movement.
To conduct our next test, we let the RC sit at idle before driving it around inside a warehouse. In this area, we expected relatively consistent PM concentrations as there was minimal airflow. In this test, we were looking purely at how the sensors reacted when in motion, so no tunnels were involved.
For this test, we faced the vents backwards off the car similarly to how we would recommend this device be mounted on a bike or other moving object.
SPS30 (Sensirion)
The SPS30 showed strong stability while moving. Even under vibration, the signal remained comparatively smooth compared to the Cubic sensors.
PMSA003I (Plantower)
In this test, the PMSA003I also performed quite well. While the concentration was significantly higher than the SPS30, this was expected due to accuracy characteristics of these sensors. This difference could be offset/calibrated for, and with similar stability to the SPS30 (albeit a bit more noise), we were impressed with the Plantower performance here.
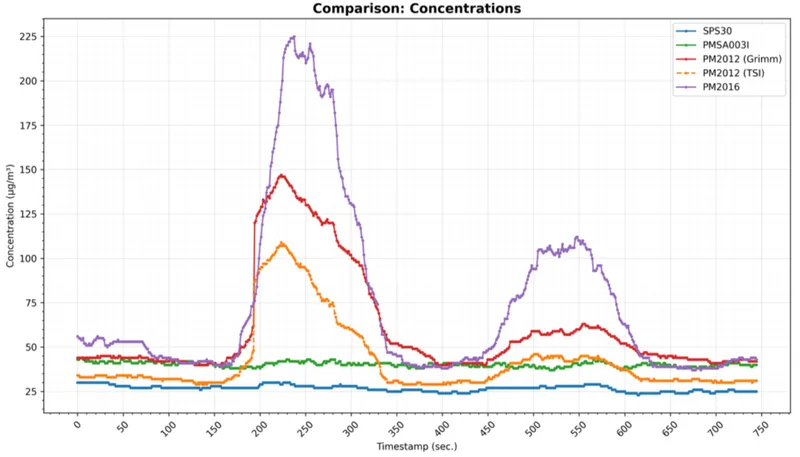
PM2012 / PM2016 (Cubic)
The Cubic sensors exhibited the worst performance by far. Both sensors (and the PM2012 with both calibrations applied) showed very significant spikes when the car started moving. The magnitude of the spike was consistent with the speed of the car.
Interestingly, when we ran this test again with the other Plantower sensors, the SPS30 did show that it was impacted either by speed or the vibrations:
However, when we looked at the particle count from the sensors as opposed to the concentration, the SPS30 was the most consistent:
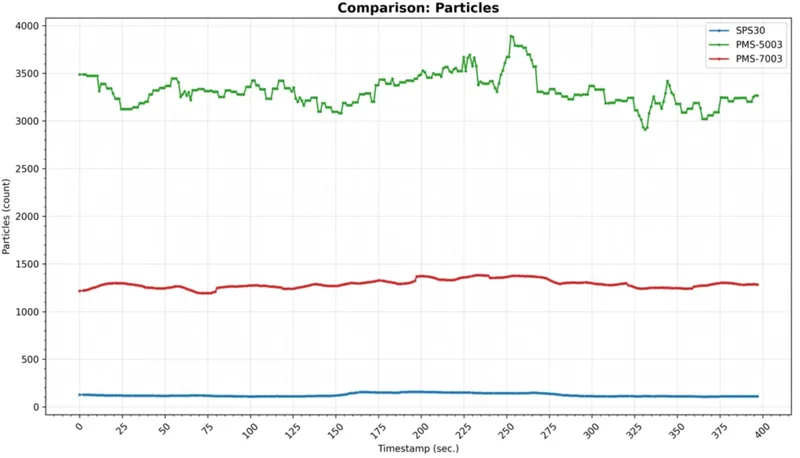
Overall, both the Plantower sensors and SPS30 performed well in this test, but we will need to investigate further why the SPS30 had the most stable particle count, but seemingly the most impacted particle concentration.
With the results from both of these tests, we had a clear front runner and had essentially removed the Cubic sensors from the running. While we did also continue to test them in later evaluations (such as when it came to stationary performance), these mobile performance characteristics led us to believe that they wouldn’t be the ideal sensor choice and that either Plantower or Sensirion had the better offering.
Conclusion
This experiment focused on how particle sensors behaved under motion - specifically how quickly they reacted to changing pollution levels and how stable their signals remained while moving. These characteristics are especially important for portable monitoring, where exposure can change rapidly and the device itself is rarely stationary. For some reason, however, these characteristics are very rarely studied despite the rise of portable air quality monitors.
Now that we’ve seen how these sensors performed in some mobile conditions, we want to continue our testing to build a complete understanding. The next step will be to evaluate these same sensors under controlled, stationary conditions. Comparing their readings against reference measurements will allow us to assess accuracy, repeatability, and drift to get an overall picture of performance.



